")
Daftar Isi:
- Langkah 1: Tonton Proyek Saya Bekerja
- Langkah 2: Dapatkan Semua Materi
- Langkah 3: Unggah Program ke Papan Arduino
- Langkah 4: Letakkan Trek dan Buat Tata Letaknya
- Langkah 5: Skema Sirkuit Selalu Membantu
- Langkah 6: Hubungkan Turnouts ke Output dari Papan Driver L298N
- Langkah 7: Hubungkan Jalur Pengumpan Daya ke Output Lain dari Papan Driver L298N
- Langkah 8: Hubungkan Papan Driver L298N ke Pin Daya Papan Arduino
- Langkah 9: Hubungkan Sensor ke Papan Arduino
- Langkah 10: Hubungkan Pin Input Driver Motor ke Papan Arduino
- Langkah 11: Tempatkan Kereta di Jalur
- Langkah 12: Nyalakan Pengaturan
- Langkah 13: SELESAI
- Pengarang John Day day@howwhatproduce.com.
- Public 2024-01-30 09:54.
- Terakhir diubah 2025-01-23 14:49.

Membuat tata letak kereta model adalah hobi yang hebat, mengotomatiskannya akan membuatnya jauh lebih baik! Mari kita lihat beberapa keuntungan dari otomatisasinya:
- Pengoperasian berbiaya rendah: Seluruh tata letak dikendalikan oleh mikrokontroler Arduino, menggunakan driver motor L298N, biayanya hampir tidak ada apa-apanya dibandingkan dengan throttle kontrol kereta tradisional dan power pack.
- Ideal untuk dipasang di layar: Karena tidak diperlukan campur tangan manusia untuk mengontrol tata letak, Anda dapat menggunakannya di layar di mana Anda tidak dapat selalu hadir untuk mengontrol kereta dan jumlah peserta.
- Bagus untuk penggemar mikrokontroler: Jika Anda atau ingin memulai dengan Arduino dan pemrograman, ini adalah proyek yang bagus bagi Anda untuk melatih keterampilan Anda.
Jika Anda tertarik, Anda juga dapat memeriksa versi sebelumnya dari proyek ini yang bahkan lebih sederhana.
Jadi, tanpa basa-basi lagi, mari kita mulai!
Langkah 1: Tonton Proyek Saya Bekerja


Langkah 2: Dapatkan Semua Materi

Untuk memulai, pastikan Anda memiliki semua hal berikut:
- Papan mikrokontroler Arduino, UNO lebih disukai.
- Papan driver motor H-jembatan ganda L298N.
- 6 kabel jumper pria ke pria.
- 7 kabel jumper pria ke wanita.
- Sebuah obeng.
- Adaptor catu daya 12 volt-DC.
- Segmen trek dengan sensor jarak IR terpasang di bagian bawah (saya menggunakan trek Kato S62)
Langkah 3: Unggah Program ke Papan Arduino
Unduh Arduino IDE dari sini jika Anda tidak memilikinya di komputer Anda. Kemudian unduh dan buka file yang diberikan.
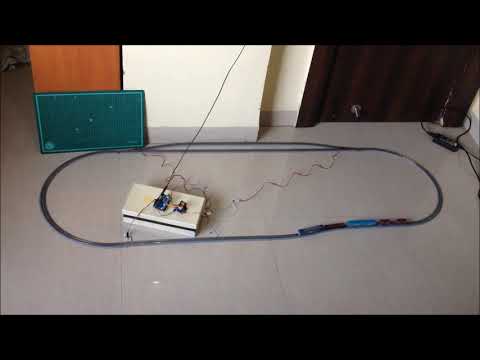
Langkah 4: Letakkan Trek dan Buat Tata Letaknya

Buat lingkaran oval dengan sisi yang lewat seperti yang ditunjukkan di atas. Pastikan jarak antara lintasan sensor dan turnout pertama kereta yang akan melintas setelah melewati lintasan sensor lebih besar dari panjang kereta sedemikian rupa sehingga tidak ada bagian dari kereta yang melewati lintasan sensor saat melintasi turnout.
Langkah 5: Skema Sirkuit Selalu Membantu

Klik pada gambar untuk mendapatkan tampilan penuh. Pastikan Anda membaca skema rangkaian lengkap dan semua detail sebelum melanjutkan.
Langkah 6: Hubungkan Turnouts ke Output dari Papan Driver L298N




Hubungkan kabel merah dan hitam dari kedua putaran masing-masing satu sama lain, menghasilkan koneksi paralel. Kemudian, sambungkan kabel merah ke out4 dan kabel hitam ke terminal out3 papan driver motor.
Langkah 7: Hubungkan Jalur Pengumpan Daya ke Output Lain dari Papan Driver L298N


Hubungkan kabel putih pengumpan daya ke out1 dan kabel biru ke terminal out2 pada papan driver motor.
Langkah 8: Hubungkan Papan Driver L298N ke Pin Daya Papan Arduino

Hubungkan pin 12 volt ke pin VIN board Arduino, pin GND ke pin GND board Arduino, dan sebaiknya pin 5 volt driver motor ke pin 5 volt board Arduino.
Langkah 9: Hubungkan Sensor ke Papan Arduino

Hubungkan pin VCC sensor ke pin 5 volt board Arduino, pin GND ke pin GND board Arduino, dan pin OUT ke pin A0 board Arduino.
Langkah 10: Hubungkan Pin Input Driver Motor ke Papan Arduino

Hubungkan pin digital board Arduino ke pin input board driver motor sebagai berikut:
- D9 ke IN1
- H10 ke IN2
- D11 ke IN3
- D12 ke IN4
Langkah 11: Tempatkan Kereta di Jalur

Setelah memeriksa semua sambungan kabel, letakkan kereta di dinding.
Langkah 12: Nyalakan Pengaturan

Nyalakan penyetelan dan pastikan turnout dialihkan ke sisi, jika tidak maka balikkan saja koneksi turnout yang dibuat dengan driver motor. Juga, pastikan kereta mulai bergerak ke arah depan. Membalikkan koneksi feeder track dengan pengemudi motor jika kereta bergerak ke arah yang salah.
Langkah 13: SELESAI
Proyek selesai, untuk saat ini. Anda dapat mengotak-atik kode Arduino untuk mengubah fungsionalitas tata letak, menambahkan lebih banyak sisi, semuanya dapat disesuaikan! Saya ingin tahu tentang modifikasi apa pun yang Anda buat pada proyek ini, beri tahu saya di komentar di bawah. Semua yang terbaik!
Direkomendasikan:
Tata Letak Kereta Api Model Otomatis Menjalankan Dua Kereta (V2.0) - Berbasis Arduino: 15 Langkah (dengan Gambar)
 - Berbasis Arduino: 15 Langkah (dengan Gambar)")
Tata Letak Kereta Api Model Otomatis Menjalankan Dua Kereta (V2.0) | Berbasis Arduino: Mengotomatiskan tata letak kereta api model menggunakan mikrokontroler Arduino adalah cara yang bagus untuk menggabungkan mikrokontroler, pemrograman, dan model kereta api menjadi satu hobi. Ada banyak proyek yang tersedia untuk menjalankan kereta secara mandiri pada model perkeretaapian
Tata Letak Kereta Api Model Otomatis Sederhana - Arduino Dikendalikan: 11 Langkah (dengan Gambar)
")
Tata Letak Kereta Api Model Otomatis Sederhana | Dikendalikan Arduino: Mikrokontroler Arduino adalah tambahan yang bagus untuk model perkeretaapian, terutama ketika berhadapan dengan otomatisasi. Berikut adalah cara sederhana dan mudah untuk memulai otomatisasi model kereta api dengan Arduino. Jadi, tanpa basa-basi lagi, mari kita mulai
Tata Letak Kereta Api Model Otomatis Dengan Loop Terbalik: 14 Langkah

Tata Letak Kereta Api Model Otomatis Dengan Loop Terbalik: Dalam salah satu Instruksi saya sebelumnya, saya menunjukkan cara membuat Model Kereta Api Titik ke Titik Otomatis Sederhana. Salah satu kelemahan utama dari proyek itu adalah kereta harus bergerak ke arah sebaliknya untuk kembali ke titik awal. R
Model Tata Letak Rel Kereta Api Dengan Melewati Berpihak Otomatis (V2.0): 13 Langkah (dengan Gambar)
: 13 Langkah (dengan Gambar)")
Model Tata Letak Perkeretaapian Dengan Pelapisan Melewati Otomatis (V2.0): Proyek ini merupakan pembaruan dari salah satu proyek otomasi perkeretaapian model sebelumnya, Tata Letak Perkeretaapian Model dengan Pembelahan Otomatis. Versi ini menambahkan fitur coupling dan decoupling lokomotif dengan rolling stock. Pengoperasian
Tata Letak Kereta Api Model Otomatis Menjalankan Dua Kereta: 9 Langkah

Tata Letak Kereta Api Model Otomatis Menjalankan Dua Kereta: Saya membuat Tata Letak Kereta Model Otomatis dengan Melewati Berpihak beberapa waktu lalu. Atas permintaan dari sesama anggota, saya membuat Instruksi ini. Ini agak mirip dengan proyek yang disebutkan sebelumnya. Tata letak mengakomodasi dua kereta dan menjalankannya secara bergantian