")
Daftar Isi:
- Pengarang John Day day@howwhatproduce.com.
- Public 2024-01-30 09:55.
- Terakhir diubah 2025-01-23 14:49.




Motivasi
Saya sangat suka tampilan POV (persistence of vision)! Mereka tidak hanya menarik untuk dilihat tetapi juga merupakan tantangan besar untuk mengembangkannya. Ini benar-benar tugas interdisipliner. Anda membutuhkan banyak keterampilan: mekanik, elektronik, pemrograman, dan sebagainya!
Saya selalu ingin membangun sendiri dan membuatnya sebesar dan sesempurna mungkin. Satu tahun yang lalu saya melakukannya! Itu banyak pekerjaan dan sangat kompleks untuk dilakukan. Saya suka tantangan seperti ini. Jadi itu menyenangkan;-)
Sekarang saya juga ingin Anda membangunnya sendiri. Anda dapat mengambil ini sebagai panduan untuk mengembangkan Anda sendiri atau cukup ikuti instruksi untuk mendapatkan salinan tampilan POV saya. Saya akan mencoba menunjukkan semua tantangan yang harus saya atasi untuk mewujudkannya.
Saya mengulangi desain saya untuk membuatnya semudah mungkin untuk membangun kembali. Tidak ada komponen SMT dan semuanya harus dapat disolder oleh pemula. Jangan salah paham, masih merupakan tantangan yang sangat besar untuk menyatukan semuanya. Tapi itu harus bisa dilakukan!
PERINGATAN: Proyek ini berisi LED yang diperbarui dengan kecepatan tinggi dan berpotensi memicu kejang untuk orang dengan epilepsi fotosensitif
Bagaimana cara kerjanya?
Di sini Anda dapat membaca cara kerja tampilan POV secara umum.
Pertama kita membutuhkan sumber yang mengalirkan sinyal video. Dalam desain aslinya saya melakukannya melalui WIFI. Saya menulis sebuah program untuk menangkap layar komputer dan mengirimkan data ini ke ESP8266 melalui WIFI. Masalah dari pendekatan ini adalah ESP8266 terlalu lambat dan bandwidth WIFI hanya cukup untuk 16 FPS. Jadi sekarang kita menggunakan ESP32. Saya berpikir bahwa semua masalah sudah diperbaiki, tetapi ternyata ESP32 juga tidak menawarkan lebih banyak bandwidth melalui WIFI daripada ESP8266. ESP32 memiliki kekuatan komputasi yang cukup untuk memecahkan kode aliran video. Jadi saya akhirnya mengirim gambar JPEG melalui WIFI ke ESP32. Oleh karena itu ESP32 meng-host situs web. Di situs ini Anda dapat memilih gambar atau video dan situs web kemudian akan mengalirkan JPEG ke ESP32. Penguraian kode JPEG membutuhkan banyak memori sehingga kami juga memiliki masalah di sana. Tapi itu bekerja untuk saat ini. Mungkin nanti saya akan memberikan solusi yang lebih baik.
Selanjutnya kita perlu mengontrol LED itu sendiri. Agar ini berfungsi, kita perlu mengetahui posisi pasti LED setiap saat. Oleh karena itu saya menambahkan sensor efek Hall. Setiap rotasi melewati magnet dan dengan demikian memungkinkan deteksi. Kemudian kami mengukur waktu rotasi. Kami berasumsi bahwa rotasi berikutnya akan memakan waktu yang sama. Oleh karena itu kita dapat menghitung posisi kita. Proses ini berulang-ulang. Untuk mengontrol LED kami menggunakan FPGA. Kami juga bisa menggunakan mikroprosesor tetapi mungkin akan terlalu lambat. LED paling luar perlu disegarkan sekitar 10.000 kali per detik. FPGA mudah menyelesaikan tugas dan akan melakukannya dengan lebih sedikit jitter.
Jika LED perlu diperbarui sesering itu, kami juga membutuhkan LED cepat. Dalam desain asli saya, saya menggunakan LED APA102. Mereka memiliki kecepatan refresh sekitar 20KHz. Saya mencoba mendapatkan strip LED dengan LED ini tetapi penjual online mengirimi saya SK9822 dan akan memberi tahu saya bahwa mereka sama (terjadi dua kali …) Jadi kami akan menggunakan SK9822. Mereka hanya memiliki kecepatan refresh 4,7kHz, tetapi semoga ini cukup. Mereka juga memiliki protokol yang sedikit berbeda. Sadari saja. Jadi ESP32 mendorong bingkai gambar ke FPGA. FPGA kemudian mengendalikan LED.
Sekarang LED hanya perlu berputar. Oleh karena itu kami menggunakan motor DC. Motor ini dikendalikan melalui sinyal PWM dari ESP8266. ESP8266 juga terhubung melalui WIFI ke ESP32. Oleh karena itu kita hanya membutuhkan satu sensor untuk mengukur kecepatan putaran. Dalam desain asli saya menggunakan dua.
Informasi lebih lanjut tentang sistem dapat ditemukan di video saya tentang desain aslinya.
Peralatan
Saya menggunakan Alat berikut:
- pencetak 3D
- Besi solder
- Lem panas
- lem super
- Kabel USB Mikro
- Gunting
- Bor + bor kayu 3 4 8 dan 12mm
- Obeng
- Tang datar
- Pemotong samping
- penari telanjang kawat
- persediaan cat
- Kertas pasir
Memesan
Saya membuka toko TINDIE. Jadi Anda dapat membeli kit jika Anda mau dan bantu saya melakukan lebih banyak proyek seperti ini;-)
K3
Seperti biasa, semua yang Anda lihat di sini diterbitkan sebagai sumber terbuka.
Pembaruan
Ada beberapa hal yang ingin saya perbaiki di masa depan:
-
Resolusi warna yang lebih tinggi dari 12 bit ke 24 bit => oleh karena itu kita membutuhkan FPGA dengan lebih banyak RAM =>
Cmod A7, mereka kompatibel dengan pin:-)
- ESP32 dengan PSRAM untuk menghindari masalah memori
- Perbaiki masalah kuas…
Perlengkapan
Bagian yang dibuat khusus
Anda perlu memesannya atau memesan kit dari saya!
1 * Main PCB (file gerber berada di bawah folder gerber main.zip)
1 * Motor Driver PCB (file gerber ada di bawah folder gerber motor.zip)
4 * Corners 3D 1 Print (file stl berada di bawah folder 3D corner.stl)
1 * Main PCB Holder 3D 3 Print (file stl berada di bawah folder 3D holder1.stl, holder2.stl, holder3.stl)
1 * Brush Holder 3D 2 Print (file stl berada di bawah folder 3D brush1.stl dan brush2.stl)
Bagian Standar
Hati-hati, beberapa tautan menyertakan paket 10 atau bahkan 100 buah.
1m * SK9822 LED Strip dengan 144 LED/m
1 * Cmod S6 FPGA
1 * Pengembangan Geekcreit 30 Pin ESP32
1 * Geekcreit D1 mini V2.2.0 ESP8266
4 * 74HCT04
5 * DC-DC 5V 4A
1 * Motor DC 775
44 * 100nf 50V
9 * 220uf 16V
10 * Magnet Neodymium 10mmx2mm
1 * Sensor efek hall
2 * Carbon Bruches Dremel 4000
2 * Sikat Karbon Motor
2 * Bantalan 6803ZZ
2 * Motor Mount 775
2 * Jack DC 5.5x2.1mm
1 * Catu Daya
1 * Tombol 8mm
2 * XT30PB Plug PCB Pria dan Wanita
2 * XT30 Plug Kabel Pria dan Wanita
2*130Ohm 1/4W Resistor
2 * MOSFET IRF3708PBF
2 * 1N5400
1 * Tajuk Pin Baris Tunggal
1 * Header Wanita
1 * Kabel 30AWG
1 * Kabel 22AWG
Toko perangkat keras
1 * MDF 500mm x 500mm x 10mm
1 * MDF 100mm x 500mm x 10mm
4 * MDF 200mm x 510mm x 10mm
1 * kaca akrilik 500mm x 500mm x 2mm
12 * Sudut Logam 40mm x 40mm x 40mm
40 * Sekrup kayu 3mm x 10mm
6 * jarak M3 12 mm
Sekrup M3 dan M4
3m * Kabel 2.5mm2 kawat tunggal/kaku
Cat hitam untuk Kayu MDF
Waktu Pembuatan: ~ 10 jam
Biaya pembuatan: ~ 300€
Langkah 1: Unduh File

Untuk memulai, pertama-tama kita harus mengunduh semua yang diperlukan untuk proyek ini.
Buka halaman rilis repositori di sini.
Kemudian unduh Release.zip dari rilis terakhir dan buka kemasannya di komputer Anda.
Setiap kali saya merujuk ke file dalam instruksi ini, Anda akan menemukannya di sana;-)
Langkah 2: Program Firmware
Langkah 2.1: Program FPGA
Untuk memprogram FPGA kita perlu menginstal perangkat lunak dari xilinx:
Untuk Windows 10 Anda perlu menginstal: ISE Design Suite untuk Windows 10 (~ 7GB)
Untuk Windows 7 atau XP Anda dapat menginstal: Alat Lab (~1GB)
Setelah menginstal Open ISE iMPACT dan klik "Tidak" jika diminta dan juga "Batal" untuk formulir proyek baru. Hubungkan FPGA Board Cmod S6 dan tunggu driver untuk menginstal. Klik dua kali pada pemindaian batas. Kemudian klik kanan pada jendela baru dan pilih "Initialize Chain". Klik "Tidak" lagi dan tutup formulir baru. Sekarang Anda akan melihat simbol "SPI/BPI", klik dua kali di atasnya. Pilih file "SPIFlash.mcs". Di form baru pilih "SPI PROM" dan "S25FL128S" dan Data Width "4". Klik "Oke". Kemudian klik satu kali pada simbol "FLASH" lagi. Seharusnya sekarang hijau. Kemudian tekan "Program". Klik "OK" pada formulir baru dan tunggu. Ini bisa memakan waktu beberapa menit.
Bagus, FPGA sudah siap;-) Anda dapat mencabutnya lagi!
Langkah 2.2: Program ESP32
Instal inti esp32 pada ID Arduino, Anda dapat mengikuti tutorial ini. V1.0.2 direkomendasikan.
Perpustakaan yang dibutuhkan:
- AutoPID oleh Ryan Downing V1.0.3 (dapat diinstal melalui pengelola perpustakaan)
- ArduinoWebsockets oleh Gil Maimon, dimodifikasi oleh saya (unduh file zip dan instal)
Buka file povdisplay.ino di folder povdisplay.
Pilih di bawah papan alat: "DOIT ESP32 DEVKIT V1". Biarkan pengaturan lainnya apa adanya.
Hubungkan papan esp32 melalui USB dan unduh programnya.
Langkah 2.3: Program ESP8266
Instal inti ESP8266 pada Arduino ID, Anda dapat mengikuti tutorial ini.
Tidak perlu perpustakaan!
Buka file motordrive.ino di folder motordrive.
Pilih di bawah Papan Alat: "Modul ESP8266 Generik". Biarkan pengaturan lainnya apa adanya.
Hubungkan papan esp8266 melalui USB dan unduh programnya.
Langkah 3: Solder PCB




LANGKAH 3.1 Solder driver motor PCB
Komponen berikut disolder:
-
WEMOS1 (Geekcreit D1 mini V2.2.0 ESP8266)
- Solder pin header ke papan WEMOS
- Solder Header Wanita di PCB
-
DCDC (DC-DC 5V 4A)
- Gunakan 4 pin dari pin header dan solder konverter DC-DC langsung ke papan
- Hati-hati dengan orientasinya, itu harus sesuai dengan layar sutra
- CN1 (Jack DC 5.5 x 2.1mm)
-
1N5400
Hati-hati dengan orientasinya, garis putih pada dioda harus berada pada sisi yang sama dengan garis pada sablon
-
220u (220uf 16V)
Hati-hati dengan orientasinya, garis putih harus berada di sisi berlawanan plus pada sablon
- R1 dan R1 (Resistor 130Ohm 1/4W)
-
Q1 dan Q2 (MOSFET IRF3708PBF)
Hati-hati dengan orientasinya, bagian belakang logam harus berada di sisi dengan garis tebal pada sablon
-
MOTOR (XT30PB Plug PCB Wanita)
Hati-hati dengan orientasinya, ujung bundar harus berada di sisi yang ditandai pada sablon
-
LED dan TASTER (XT30PB Plug Male PCB)
Hati-hati dengan orientasinya, ujung bundar harus berada di sisi yang ditandai pada sablon
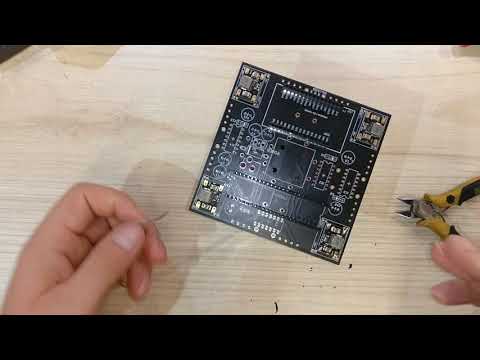
LANGKAH 3.2 Solder PCB utama
Komponen berikut disolder:
-
CMODS6 (Cmod S6 FPGA)
Harus ada pin header yang disertakan. Solder mereka di PCB
-
ESP (Pengembangan Geekcreit 30 Pin ESP32)
Gunakan Header Wanita dan solder mereka di PCB
-
DCDC1 - DCDC4 (DC-DC 5V 4A)
- Gunakan 4 pin dari pin header dan solder konverter DC-DC langsung ke board
- Hati-hati dengan orientasinya, itu harus sesuai dengan layar sutra
- POWER_TEST (Jack DC 5,5 x 2,1 mm)
-
D1 (1N5400)
Hati-hati dengan orientasinya, garis putih pada dioda harus berada pada sisi yang sama dengan garis pada sablon
-
POWER (XT30PB Steker PCB Wanita)
Hati-hati dengan orientasinya, ujung bundar harus berada di sisi yang ditandai pada sablon
-
C1, C3, C4, C6, C7, C9, C10, C11 (220uf 16V)
Hati-hati dengan orientasinya, garis putih pada kapasitor harus berada di sisi berlawanan dari plus di layar sutra
- C2, C5, C8, C12 (100nf 50V)
-
IC1 - IC4 (74HCT04)
Hati-hati untuk menyelaraskan potongan IC dengan tanda pada layar sutra
LANGKAH 3.3 Lem panas
PCB utama akan berputar sangat cepat. Jadi kita perlu merekatkan kapasitor (C1, C3, C4, C6, C7, C9, C10, C11) ke PCB untuk menghindari masalah. Cukup gunakan lem panas untuk itu.
Langkah 4: Siapkan Strip

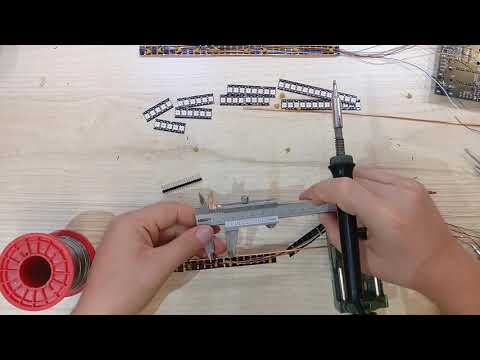



LANGKAH 4.1 Potong strip menjadi beberapa bagian
Lepaskan pelindung air dengan gunting.
Kami membutuhkan empat SAYAP dan setiap sayap berisi empat grup. Satu SAYAP istimewa, ia memiliki satu LED lebih banyak dari yang lain.
SAYAP1:
- G1: 5 LED (kelompok paling luar)
- G2: 6 LED
- G3: 8 LED
- G4: 14 LED
SAYAP2 - SAYAP4:
- G1: 5 LED (kelompok paling luar)
- G2: 6 LED
- G3: 8 LED
- G4: 13 LED
Oleh karena itu kami membutuhkan 129 LED dan strip kami memiliki 144 sehingga kami memiliki toleransi untuk potongan yang salah;-) Dalam kasus terburuk, Anda dapat menyolder potongan.
Potong sepusat mungkin di antara LED.
LANGKAH 4.2 Solder kabel ke strip LED
Pada masing-masing segmen strip LED, solder dua kabel 30AWG pada jam dan pin data. Ini adalah dua pin di tengah. Berhati-hatilah untuk menyoldernya pada input strip LED. Biasanya, panah menunjukkan arah aliran data. Panjang kabel harus sekitar setengah meter
Potong semuanya dari sisi lain strip untuk menghindari hubungan pendek antara data dan pin jam dari grup yang berbeda saat kita menyatukan SAYAP.
LANGKAH 4.3 Solder kapasitor
Pada setiap grup solder dua kapasitor (100nf 50V) di bagian belakang segmen strip LED di setiap ujungnya. Untuk G4 juga solder satu di tengah. Kabel harus berada di bawah kapasitor untuk menyisakan ruang tetapi tidak terlalu banyak.
LANGKAH 4.4 Pasang SAYAP bersama-sama
Untuk setiap WING memimpin kabel dari G1 melalui G2 dan kemudian kabel ini melalui G3 dan sama dengan G4.
LANGKAH 4.4 Solder kelompok bersama-sama
Sekarang kita membutuhkan kabel tembaga (kabel 2.5mm2 kabel tunggal/kaku). Potong menjadi delapan bagian dengan panjang sekitar ~30cm. Lepaskan isolasi semua kabel. Luruskan kabel sebanyak mungkin. Anda dapat memperbaiki salah satu ujungnya di klem sekrup dan memegang yang lain dengan tang datar dan kemudian memukul tang dengan palu.
Perbaiki kabel di satu sisi agar lebih mudah digunakan. Kemudian solder grup pertama ke sana. Sejajarkan segmen strip LED dengan kabel dan solder di satu sisi ke dua kapasitor. Kabel harus diletakkan rata pada strip LED. Lanjutkan dengan kelompok berikutnya. Berhati-hatilah agar jarak antara dua grup LED juga 7mm. Pada akhirnya semua LED harus memiliki celah yang sama di antara mereka. Lanjutkan dengan dua kelompok lainnya. Pada kelompok terakhir solder ketiga kapasitor ke kawat.
Kemudian potong kabel di ujungnya. Lanjutkan dengan kabel lain di sisi lain strip.
Sekarang SAYAP pertama selesai! Lakukan hal yang sama untuk tiga Sayap lainnya.
LANGKAH 4.5 Tekuk kapasitor
Tekuk saja semuanya untuk membuat potongannya tipis.
Langkah 5: Solder Strip pada PCB Utama




LANGKAH 5.1 Periksa polarisasi
Pertama kita perlu mengetahui polarisasi strip LED. Dengan kata lain: Dimana 5V dan ground relatif terhadap PCB. Ini sangat tergantung pada strip LED yang Anda miliki dan bisa juga sebaliknya.
Tahan satu SAYAP ke PCB utama. Panah pada strip LED harus mengarah ke tengah PCB. Sekarang lihat apakah 5V ada di sisi DATA atau CLOCK pin.
Jika 5V berada di sisi DATA Anda baik-baik saja dan Anda dapat menggunakan tembaga 2.5mm2 untuk menyolder strip LED langsung ke PCB.
Jika tidak, Anda perlu menggunakan kabel 22AWG untuk mencoret kedua sisinya. Oleh karena itu, solder kabel ke strip LED dan coret sisi kiri dan kanan dan solder ke PCB.
LANGKAH 5.2 Solder kabel 2.5 mm2
Gunakan sisa kabel tembaga 2,5 mm2 dan lepaskan semuanya. Solder mereka di sisi atas PCB. Potong kawat solder pada ketinggian yang sama sekitar 1cm.
LANGKAH 5.3 Solder SAYAP pertama
Gunakan WING yang lebih panjang dan posisikan pada PCB (LEDs1) seperti yang ditunjukkan pada layar sutra. Solder ke kabel 2,5 mm2. Buat koneksi yang sangat kuat ini akan melihat banyak kekuatan selama rotasi! Kemudian sambungkan kabel untuk Grup 1 ke Data G1 dan Jam G1.
Jangan lupa untuk menyolder sambungan listrik seperti yang dijelaskan di atas.
Hubungkan ESP32 dan FPGA (48 dan 1 ada di sisi yang ditandai) dan nyalakan papan dengan catu daya.
LED paling luar seharusnya berkedip biru sekarang (bisa memakan waktu hingga 40 detik untuk melakukannya). Jika tidak, periksa apakah Anda menghubungkan CLOCK dan DATA dengan cara yang benar.
LANGKAH 5.4 Sensor efek hall
Solder header Pin Wanita (dengan tiga pin) ke Aula. Nanti kita akan menghubungkan sensor ke sana.
Solder sensor (sensor efek Hall) ke header pin jantan. Tautan dengan senor dan pin header harus sekitar 25mm.
LANGKAH 5.5 Lanjutkan dengan SAYAP lainnya
Untuk LEDs2 - LEDs4 == WING2 - WING4 lakukan proses yang sama seperti pada WING1.
Dari waktu ke waktu nyalakan PCB dan periksa apakah semuanya berkedip. Polanya dimulai dengan led paling luar dan masuk ke dalam dan mulai lagi.
LANGKAH 5.6 Saldo
Cobalah untuk menyeimbangkan PCB utama di tengah dengan benda runcing. Jika satu sisi lebih berat, coba tambahkan solder ke sisi lainnya. Tidak harus sempurna, tetapi terlalu banyak ketidakseimbangan nantinya akan menghasilkan banyak getaran selama operasi, yang dapat menyebabkan masalah mekanis.
Langkah 6: Cat Pertama

Langkah 6.1: Bor
Kita perlu mengebor beberapa lubang:
Pada papan MDF 500*500 kita membutuhkan dua lubang. Lihat file drill_wood_500_500.pdf dan bor lubang sesuai rencana.
Pada papan MDF 500*100 kita membutuhkan banyak lubang. Oleh karena itu cetak file drill_wood_500_100_A4.pdf dan sejajarkan di papan tulis. Hanya bor di mana lubang ditandai di atas kertas.
Langkah 6.2: Melukis
Cat satu sisi setiap kayu. Untuk papan MDF 500 x 500 itu adalah sisi tempat Anda mengebor.
Cat kedua sisi kayu 100x500.
Anda juga bisa mengecat sudut logam dengan warna hitam. Ini akan terlihat lebih baik;-)
Sisanya akan kita cat setelah kita merakit semuanya (bagian luar kotak).
Langkah 7: Perakitan Mekanis

Langkah 7.1 Pasang PCB Driver Motor
PCB dipasang pada papan MDF 100 x 500. Gunakan spacer (spacer M3 12 mm) dan beberapa sekrup dan mur m3.
Langkah 7.2 Pasang braket
Pasang kedua braket (Motor Mount 775) pada Papan MDF 100 x500 dengan sekrup M4.
Langkah 7.3 Siapkan Pemegang
Kedua pembatas (Bearings 6803ZZ) harus dinonaktifkan. Kami hanya membutuhkan dua cincin luar darinya.
Solder kabel 22AWG pada masing-masing ring. Satu hitam dan satu merah.
Ambil bagian cetakan 3D Holder dan rakit.
Masukkan ketujuh mur M3 ke dalam lubangnya masing-masing dan geser cincin dengan kabel merah terlebih dahulu pada dudukannya, lalu spacer dan kemudian cincin dengan kabel hitam. Tambahkan potongan ketiga di atas dan masukkan sekrup.
Potong kedua kabel pada jarak 2 cm dan solder jeck (Kabel Male Plug XT30) ke sana. Kabel hitam menuju ke sisi yang melengkung.
Langkah 7.4 Pasang Motor
Pasang motor (Motor DC 775) ke dudukan motor di tengah papan MDF 100 x500.
Pasang dudukan pada motor dan kencangkan.
Langkah 7.5 Instal Kuas
Saya berencana untuk menggunakan sikat Dremel (Carbon Brushes Dremel 4000). Kita perlu menggunakan batu bara lain (Motor Carbon Brushes) karena batu bara untuk sikat Dremel memiliki resistensi yang terlalu tinggi. Saya mengabaikan itu dalam proses pengembangan. Jadi kami menggunakan sikat motor dan mengampelasnya seukuran sikat dremel.
Potong kawat dari sikat motor pada jarak 5 mm dari batubara.
Kemudian kami menggunakan kertas amplas untuk memotong batubara ke dimensi berikut: 8,4 x 6,3 x 4,8 mm
Satu sisi sikat motor berukuran 6,1 mm, jadi kita hanya perlu mengampelas dua sisinya saja.
Anda dapat mencoba jika mudah meluncur di tempat sikat, maka tidak apa-apa.
Coba juga untuk mengampelas kurva di bagian atas untuk meningkatkan koneksi ke cincin logam.
Solder kabel 22AWG pada batubara untuk kedua batubara. Gunakan kabel merah dan hitam. Masukkan pegas dari sikat dremel.
Masukkan kuas ke dalam pemegang kuas. Sikat dengan kabel merah masuk ke atas. Sisi atas dudukan sedikit lebih tebal. Berhati-hatilah agar kedua pegas tidak saling bersentuhan.
Pasang dudukan ke alas dengan mur dan sekrup m3.
Pasang alas dudukan sikat ke dudukan motor kedua yang di-bracking. Gunakan sekrup dan mur M4 yang disertakan dengan braket.
Motor harus bisa berputar bebas.
Arahkan kedua kabel di antara kedua braket.
Potong kedua kabel dengan panjang sehingga hanya dapat mencapai PCB dan menyolder jeck (XT30 Plug Male Cable) ke sana. Kabel hitam mengarah ke sisi melengkung.
Solder dua kabel 22AWG ke motor dan potong pada jarak untuk mencapai PCB dengan mudah dan solder jeck (kabel steker perempuan XT30) ke sana. Kabel hitam mengarah ke sisi melengkung.
Langkah 8: Selesai
Direkomendasikan:
Google Glass/Bantuan Orang Miskin untuk Mereka yang Memiliki Visi Terowongan: 5 Langkah (dengan Gambar)
")
Google Glass/Bantuan Orang Miskin untuk Mereka yang Memiliki Terowongan Visi: Abstrak:Proyek ini mengalirkan video langsung dari kamera mata ikan ke layar head-up yang dapat dikenakan. Hasilnya adalah bidang pandang yang lebih luas dalam area yang lebih kecil (tampilannya sebanding dengan 4" layar 12" dari mata Anda dan menghasilkan 720
Semua dalam Satu Sistem Arcade: 12 Langkah (dengan Gambar)
")
All in One Arcade System: Saya telah membuat joystick arcade sebelumnya dan itu sangat besar (60x30x12 cm untuk 2 pemain), juga sulit digunakan karena Anda akan membutuhkan PC dengan semua emulasi yang siap dimainkan, dll. akhirnya disimpan di suatu tempat yang tidak dapat kuingat
Pengelola Kata Sandi, Pengetik, Makro, Muatan Semua dalam SATU!: 11 Langkah (dengan Gambar)
")
Pengelola Kata Sandi, Pengetik, Makro, Muatan… Semua dalam SATU!: PERHATIAN HARAP: Jika Anda mengalami masalah dengan pembuatan perangkat ini (PCB, solder atau lainnya) jangan ragu untuk mengirim saya pesan pribadi di sini atau email ke davidex720@gmail.com. Saya akan dengan senang hati mengirimkan salah satu pcb atau perangkat yang sudah saya produksi
Tampilan Temperatur pada Modul Tampilan LED P10 Menggunakan Arduino: 3 Langkah (dengan Gambar)
")
Tampilan Temperatur Pada Modul Tampilan LED P10 Menggunakan Arduino : Pada tutorial sebelumnya telah diberitahukan cara menampilkan teks pada Modul Tampilan LED Dot Matrix P10 menggunakan Konektor Arduino dan DMD yang bisa anda cek disini. Dalam tutorial ini kami akan memberikan tutorial proyek sederhana dengan memanfaatkan modul P10 sebagai media tampilan
Kotak Cahaya yang Dapat Dilipat untuk Mereka yang Kekurangan Ruang dan Uang Tunai: 12 Langkah (dengan Gambar)
")
Kotak Lampu yang Dapat Dilipat untuk Mereka yang Kekurangan Ruang dan Uang Tunai: Saya memutuskan untuk mengambil tantangan dalam membuat kotak lampu yang terjangkau dan dapat dilipat untuk orang-orang yang mungkin kekurangan ruang dan juga uang. Masalah yang saya temukan dengan banyak kotak lampu inti busa yang terjangkau adalah bahwa setiap kali Anda ingin mengambilnya, lakukan