")
Daftar Isi:
- Langkah 1: Bagian Pencetakan dan Perakitan
- Langkah 2: Pangkalan Baru
- Langkah 3: Perbaikan Kecil
- Langkah 4: PCB Buatan Sendiri
- Langkah 5: Etsa PCB
- Langkah 6: Penggilingan PCB
- Langkah 7: Penggilingan PCB: Dapatkan File untuk Produksi
- Langkah 8: Penggilingan PCB: Proses Penggilingan
- Langkah 9: Penggilingan PCB: Bersihkan Pekerjaan
- Langkah 10: Menyolder Komponen
- Langkah 11: Firmware dan Perangkat Lunak
- Langkah 12: Pengujian
- Langkah 13: Lanjutkan Perakitan
- Langkah 14: Kalibrasi
- Langkah 15: Tes Mandarin Pertama
- Langkah 16: Terima kasih
- Pengarang John Day day@howwhatproduce.com.
- Public 2024-01-30 09:56.
- Terakhir diubah 2025-01-23 14:49.


Halo semua, Saya akan mewujudkan pemindai 3D Ciclop yang terkenal.
Semua langkah yang dijelaskan dengan baik pada proyek asli tidak ada.
Saya membuat beberapa perbaikan untuk menyederhanakan proses, pertama saya mencetak alasnya, dan kemudian saya mengatur ulang PCB, tetapi lanjutkan.
Langkah 1: Bagian Pencetakan dan Perakitan
Untuk bagian perakitan, solusi terbaik adalah merujuk ke dokumentasi origina
www.bq.com/it/support/ciclop/support-sheet
dalam multibahasa dan dijelaskan dengan baik.
Bagian yang dicetak cukup sederhana untuk dirakit.
Ada banyak video juga, yang resmi adalah ini.
Langkah 2: Pangkalan Baru


Satu-satunya bagian yang sulit ditemukan adalah alas Plexiglass, jadi saya mendesain yang dapat dicetak dengan printer Anet A8 3d saya.
Anda dapat menemukan proyek di sini.
Langkah 3: Perbaikan Kecil


Masalah lainnya adalah Anda mungkin dapat menemukan laser murah yang tidak sesuai dengan dudukan aslinya.
Laser yang umum adalah laser 12mm.
Jadi Anda bisa menggunakan varian cetak ini.
Masalah lain adalah menghentikan bagian yang berputar, saya pikir solusi yang lebih baik adalah menggunakan karet gelang, seperti yang Anda lihat pada gambar.
Langkah 4: PCB Buatan Sendiri

Untuk proyek ini saya membuat PCB yang sepenuhnya kompatibel dengan pemindaian Zum asli yang lebih kompleks, tetapi semua fitur tambahan tidak digunakan.
Versi saya untuk Arduino Nano, jadi lebih sedikit dari yang asli.
Jika Anda tidak memiliki keterampilan untuk memproduksi PCB secara otomatis, Anda dapat menggunakan file gerber yang dapat Anda temukan di artikel untuk dikirim ke pabrik yang memproduksi PCB seperti
Langkah 5: Etsa PCB
Saya tidak pernah menggunakan teknik ini, tetapi saya menambahkan pada langkah ini file svg atau PDF untuk produksi.
Langkah 6: Penggilingan PCB
Saya menggunakan teknik ini untuk produksi pribadi saya, tentang ini saya menulis 2 artikel:
Yang pertama adalah panduan langkah demi langkah untuk membuat CNC portabel yang sempurna dan dioptimalkan untuk Penggilingan CNC.
Berikut panduannya.
Dari panduan sebelumnya yang menjelaskan langkah demi langkah cara menggunakan mesin, cara membuat PCB dan cara membuat file untuk produksi.
Berikut panduan lainnya.
Langkah 7: Penggilingan PCB: Dapatkan File untuk Produksi
Saya menambahkan di sini file untuk produksi, gerber atau langsung gcode untuk mesin penggilingan
Langkah 8: Penggilingan PCB: Proses Penggilingan



Pertama giling bagian bawah tembaga, lalu bor lubangnya.
Langkah 9: Penggilingan PCB: Bersihkan Pekerjaan


Kemudian gunakan kertas pasir untuk membuat papan rata dan bersih.
Langkah 10: Menyolder Komponen



Untuk papan ini saya menggunakan:
- Arduino Nano
- A4988 driver Stepper
- 2x 1k resistor
- 1x 10k resistor
- 2x 2n2222 transistor
- 5.5 Barel untuk tegangan input
Saya menggunakan catu daya 12v 2A (ke laras) untuk memberi daya pada driver stepper.
Dari konektor usb sudah cukup untuk laser dan Arduino.
Langkah 11: Firmware dan Perangkat Lunak

Anda dapat mengunduh firmware untuk mengunggah ke Arduino dari sini
github.com/bqlabs/horus-fw
Seperti yang dijelaskan dalam panduan, kamera adalah webcam Logitech C270 HD, drivernya ada di sini.
support.logitech.com/en_ca/product/hd-webca…
Anda dapat menemukan perangkat lunak di sini.
horus.readthedocs.io/en/release-0.2/
jika Anda mengalami kesulitan untuk mengunduh, Anda dapat pergi ke sini
github.com/LibreScanner/horus/releases
Langkah 12: Pengujian

Pertama saya menguji semua tanpa kamera, dan itu bekerja dengan baik.
Anda dapat menggunakan file ino untuk memeriksa laser dan stepper
Langkah 13: Lanjutkan Perakitan


Kemudian saya menambahkan kamera, memperbaiki papan dan menambahkan kertas hitam di atas platform.
Langkah 14: Kalibrasi
Ada banyak video tentang kalibrasi, langkah ini sangat sederhana.
Saya mewujudkan video minimal ini dengan Ciclop baru saya.
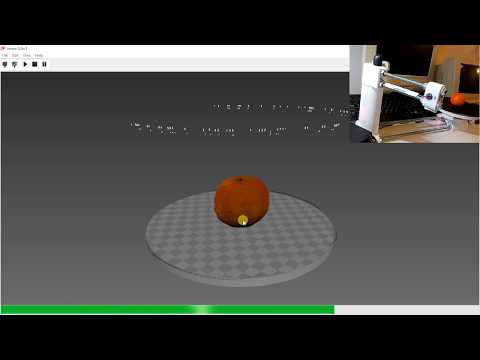
Langkah 15: Tes Mandarin Pertama
Dalam video ini saya hanya memindai objek, tetapi untuk mendapatkan gambar yang bagus Anda harus melakukan beberapa pemrosesan pasca dengan perangkat lunak seperti MeshLab.
Langkah 16: Terima kasih
Sekarang mulai memindai semua.
Direkomendasikan:
Sistem Peringatan Parkir Terbalik Mobil Arduino - Langkah demi Langkah: 4 Langkah

Sistem Peringatan Parkir Mundur Mobil Arduino | Langkah demi Langkah: Pada proyek kali ini, saya akan merancang Rangkaian Sensor Parkir Mundur Mobil Arduino sederhana menggunakan Sensor Ultrasonik Arduino UNO dan HC-SR04. Sistem peringatan mundur mobil berbasis Arduino ini dapat digunakan untuk Navigasi Otonom, Jarak Robot, dan r
Pendidikan Langkah demi Langkah dalam Robotika Dengan Kit: 6 Langkah

Pendidikan Selangkah demi Selangkah dalam Robotika Dengan Kit: Setelah beberapa bulan membuat robot saya sendiri (silakan lihat semua ini), dan setelah dua kali mengalami bagian yang gagal, saya memutuskan untuk mengambil langkah mundur dan memikirkan kembali strategi dan arahan. Pengalaman beberapa bulan terkadang sangat bermanfaat, dan
Levitasi Akustik Dengan Arduino Uno Langkah-demi-Langkah (8-langkah): 8 Langkah
: 8 Langkah")
Akustik Levitation Dengan Arduino Uno Langkah-demi-Langkah (8-langkah): transduser suara ultrasonik L298N Dc female adapter power supply dengan pin dc laki-laki Arduino UNOBreadboardCara kerjanya: Pertama, Anda mengunggah kode ke Arduino Uno (ini adalah mikrokontroler yang dilengkapi dengan digital dan port analog untuk mengonversi kode (C++)
Otomatisasi Rumah Langkah demi Langkah Menggunakan Wemos D1 Mini Dengan Desain PCB: 4 Langkah

Otomasi Rumah Langkah demi Langkah Menggunakan Wemos D1 Mini Dengan Desain PCB: Otomatisasi Rumah Langkah demi Langkah menggunakan Wemos D1 Mini dengan Desain PCBBeberapa minggu yang lalu kami menerbitkan tutorial "Otomasi Rumah Menggunakan Raspberry Pi" di rootaid.com yang diterima dengan baik di kalangan penggemar dan mahasiswa. Kemudian salah satu anggota kami datang
Cara Menggunakan RPLIDAR 360° Laser Scanner Dengan Arduino: 3 Langkah (dengan Gambar)
")
Cara Menggunakan Pemindai Laser RPLIDAR 360° Dengan Arduino: Saya penggemar berat pembuatan robot sumo dan saya selalu mencari sensor dan bahan baru yang menarik untuk digunakan untuk membuat robot yang lebih baik, lebih cepat, dan lebih pintar. Saya mengetahui tentang RPLIDAR A1 yang bisa Anda dapatkan seharga $99 di DFROBOT.com. Saya bilang saya tertarik